| (19) |
 |
|
(11) |
EP 2 063 406 B1 |
| (12) |
EUROPÄISCHE PATENTSCHRIFT |
| (45) |
Hinweis auf die Patenterteilung: |
|
28.07.2010 Patentblatt 2010/30 |
| (22) |
Anmeldetag: 09.08.2008 |
|
| (51) |
Internationale Patentklassifikation (IPC):
|
|
| (54) |
Verfahren und Anordnung zur Warnung vor Hindernissen mit nicht ausreichender Durchfahrtshöhe
und/oder nicht ausreichender Durchfahrtsbreite
Method and apparatus for warning about obstacles which are not high and/or wide enough
to drive through
Procédé et dispositif d'alerte d'obstacles ayant une hauteur et/ou une largeur de
passage insuffisante
|
| (84) |
Benannte Vertragsstaaten: |
|
AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL
PT RO SE SI SK TR |
| (30) |
Priorität: |
13.11.2007 DE 102007053989
|
| (43) |
Veröffentlichungstag der Anmeldung: |
|
27.05.2009 Patentblatt 2009/22 |
| (73) |
Patentinhaber: WABCO GmbH |
|
30432 Hannover (DE) |
|
| (72) |
Erfinder: |
|
- Breuer, Karsten Dr.
31867 Lauenau (DE)
- Dieckmann, Thomas Dr.
30982 Pattensen (DE)
|
| (56) |
Entgegenhaltungen: :
EP-A- 1 475 765
DE-A1-102005 062 151
|
DE-A1- 10 128 792
US-A1- 2003 028 291
|
|
| |
|
|
|
|
| |
|
| Anmerkung: Innerhalb von neun Monaten nach der Bekanntmachung des Hinweises auf die
Erteilung des europäischen Patents kann jedermann beim Europäischen Patentamt gegen
das erteilte europäischen Patent Einspruch einlegen. Der Einspruch ist schriftlich
einzureichen und zu begründen. Er gilt erst als eingelegt, wenn die Einspruchsgebühr
entrichtet worden ist. (Art. 99(1) Europäisches Patentübereinkommen). |
[0001] Die Erfindung betrifft ein Verfahren und eine Anordnung zur Warnung vor Hindernissen
mit nicht ausreichender Durchfahrtshöhe und/oder nicht ausreichender Durchfahrtsbreite
gemäß Oberbegriff des Anspruchs 1.
[0002] Wenn Nutzfahrzeuge, wie Lastkraftwagen, Busse, etc. unbekannte Brücken, Tunnel usw.
durchfahren müssen, ist es für den Fahrer oftmals schwer zu erkennen, ob die Durchfahrtshöhe
oder auch die Durchfahrtsbreite ausreichend für das Fahrzeug ist. Besonders schwierig
wird es, wenn eine Brücke unzureichend beschildert ist oder Fahrbahnunebenheiten die
effektive Höhe verringern. Die Probleme sind besonders groß bei Nachtfahrten, weil
es dann nahezu unmöglich ist, die Durchfahrtshöhe bzw. Durchfahrtsbreite sicher einzuschätzen.
[0003] Das Dokument
EP1475765A2 offenbart eine Vorrichtung zur Bestimmung einer Durchfahrtsmöglichkeit für ein Fahrzeug
an Hindernissen, die dazu dient, abzuschätzen, ob ein Fahrzeug bezüglich seiner Fahrzeughöhe
und/oder seiner Fahrzeugbreite zwischen Hindernissen hindurch fahren kann. Dazu wird
mit einer Sensoreinheit vor einem Hindernis die Durchfahrtsbreite und/oder die Durchfahrtshöhe
gemessen und mit den gespeicherten Fahrzeugdaten verglichen. Bei nicht ausreichender
Durchfahrtsbreite/Durchfahrtshöhe wird eine optische, akustische und/oder haptische
Warnung an den Fahrer ausgegeben. Ferner kann die ermittelte Durchfahrtsbreite bzw.
Durchfahrtshöhe an einer Anzeigeeinheit dem Fahrer zur Verfügung gestellt werden.
Auch eine Lenkrichtungskorrektur für den Fahrer wird beschrieben. Optional kann ein
Sicherheitsabstand vorgesehen werden, der bei dem Vergleich der zur Verfügung stehenden
Durchfahrtsbreite bzw. Durchfahrtshöhe mit der Fahrzeugbreite bzw. Fahrzeughöhe berücksichtigt
wird, indem der Sicherheitsabstand vorzugsweise der Fahrzeugbreite bzw. Fahrzeughöhe
hinzuaddiert wird. Der Sicherheitsabstand ist mittels einer Bedieneinheit u. a. an
die Fahrfähigkeiten des Fahrers anpassbar.
[0004] Die Aufgabe der vorliegenden Erfindung besteht darin, ein Verfahren und eine Anordnung
zur Warnung vor Hindernissen mit nicht ausreichender Durchfahrtshöhe und/oder nicht
ausreichender Durchfahrtsbreite anzugeben, durch das bzw. die der Fahrer rechtzeitig
vor einer zu geringen Durchfahrtshöhe oder einer zu geringen Durchfahrtsbreite gewarnt
wird.
[0005] Ein Verfahren zur Lösung der Aufgabe ist im Anspruch 1 und eine Anordnung zur Lösung
der Aufgabe ist im Anspruch 7 angegeben.
[0006] Vorteilhafte und zweckmäßige Weiterbildungen sind in den den Ansprüchen 1 und 7 nachgeordneten
Unteransprüchen angegeben.
[0007] Die vorliegende Erfindung hat den Vorteil, dass sie den Fahrer rechtzeitig vor zu
geringen Durchfahrtshöhen und zu geringen Durchfahrtsbreiten warnt und ggf. bei Nichtbeachtung
der Warnung durch den Fahrer eine automatische Bremsung initiiert. Hierdurch werden
vor allem in städtischen Bereich durch Durchfahrtshöhenfehleinschätzungen von Fahrern
Fahrzeugbeschädigungen vermieden.
[0008] Die Erfindung soll nachfolgend anhand der beigefügten Zeichnung, in der schematisch
eine erfindungsgemäße Anordnung zur Warnung vor Hindernissen mit nicht ausreichender
Durchfahrtshöhe und/oder nicht ausreichender Durchfahrtsbreite dargestellt ist, näher
erläutert werden.
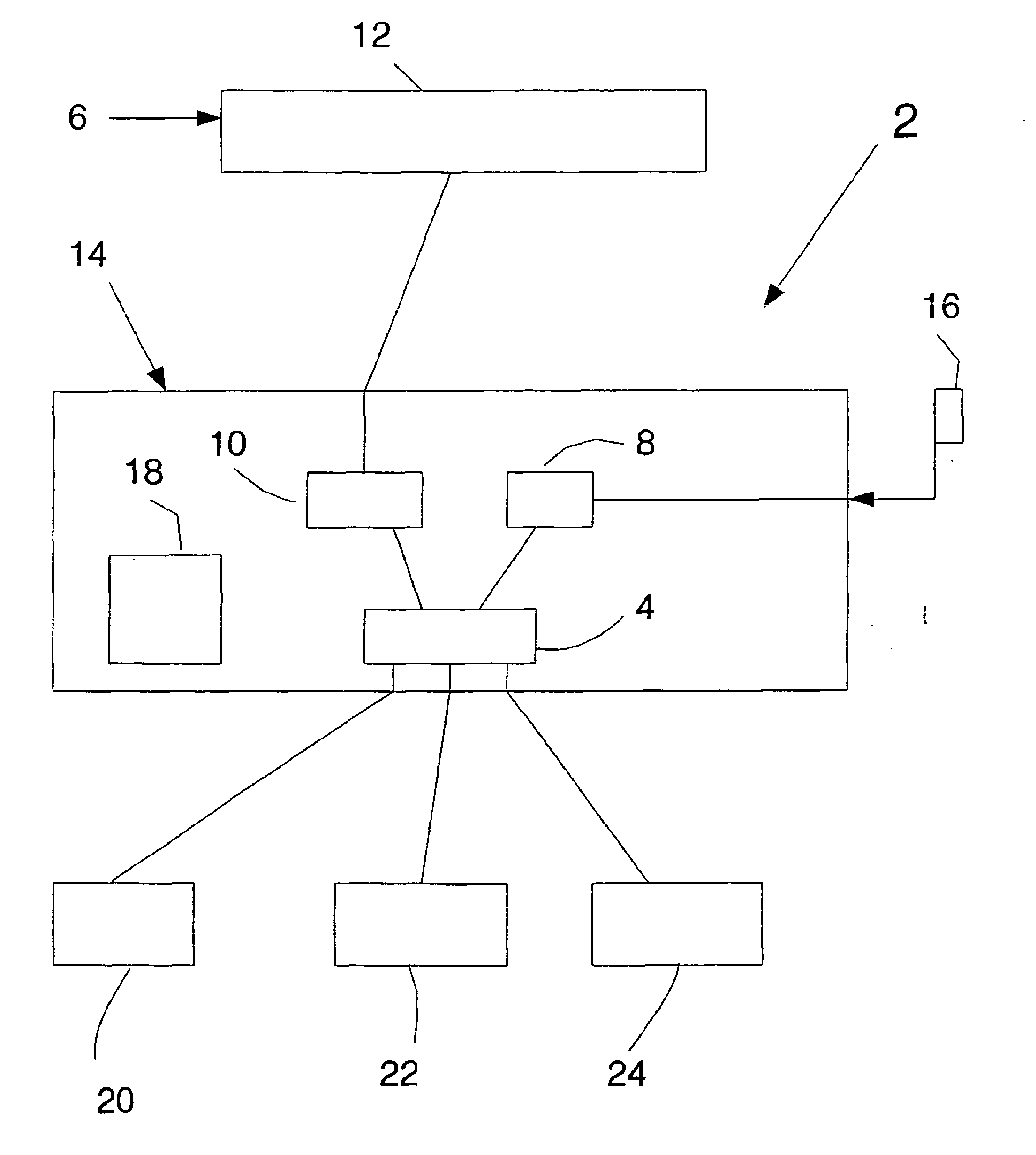
[0009] In der Zeichnung ist eine erfindungsgemäße Anordnung 2 zur Warnung vor Hindernissen
mit nicht ausreichender Durchfahrtshöhe und/oder nicht ausreichender Durchfahrtsbreite,
insbesondere für Kraftfahrzeuge dargestellt. Die Anordnung 2 umfasst eine Vergleichs-
und Warnsignale generierende Einrichtung 4 und eine Sensoreinrichtung 6. Die Vergleichs-
und Warnsignale generierende Einrichtung 4 ist mit einem ersten Speicher 8 für durchfahrtsrelevante
Daten oder Parameter des Kraftfahrzeugs und mit einem zweiten Speicher 10 für durchfahrtsrelevante
Daten der Hindernisse verbunden.
[0010] Die Sensoreinrichtung 6 dient zur Abtastung und Erfassung von durchfahrtsrelevanten
Daten vorausliegender Hindernisse und zur Eingabe dieser Daten in den zweiten Speicher
10.
[0011] In der Vergleichs- und Warnsignale generierenden Einrichtung 4 werden die durchfahrtsrelevanten
Daten aus dem ersten und zweiten Speicher 8, 10 derart miteinander verglichen, dass
ein Warnsignal für den Fahrer generiert wird, wenn die dem Hindernis zugeordneten,
durch die Sensoreinrichtung 6 ermittelten Daten aus dem zweiten Speicher 10 mit den
dem Fahrzeug zugeordneten Daten aus dem ersten Speicher 8 übereinstimmen oder diese
unterschreiten.
[0012] Die Sensoreinrichtung 6 umfasst wenigstens einen Abstandssensor 12, der den vorausliegenden
Fahrraum erfasst. Die Erfassungsgeometrie ist dabei so gewählt, dass gleichzeitig
Hindernisse sowie die Fahrbahnoberfläche erfasst werden. Der Abstandssensor weist
vorzugsweise eine hohe Winkelauflösung auf, um die Kontur eines Vertikalschnitts des
Hindernisses genau erfassen zu können.
[0013] Die von der Sensoreinrichtung 6 erfassten Winkel- und Abstandsinformationen werden
einer Auswerteeinrichtung 14 zur Auswertung und Ermittlung der Durchfahrtshöhen und/oder
der Durchfahrtsbreiten des jeweiligen Hindernisses zugeführt.
[0014] Im Fahrzeug kann ein Bedienelement 16 vorgesehen sein, mittels dessen der Fahrer
vor Fahrtantritt die durchfahrtsrelevanten Daten seines Fahrzeugs in den ersten Speicher
8 eingibt. Die durchfahrtsrelevanten Daten des Fahrzeugs können alternativ auch im
System parametriert sein.
[0015] Die Warnsignale generierende Einrichtung 4 generiert im Warnfalle optische, akustische
und/oder haptische Warnsignale für den Fahrer. Das optische Warnsignal kann auf einer
optischen Anzeige 20 erscheinen. Das akustische Warnsignal kann über einen Lautsprecher
22 ausgegeben werden und das haptische Warnsignal kann durch kurzes Bremsrucken einer
Bremse 24 realisiert werden.
[0016] Die Anordnung 2 umfasst vorzugsweise noch eine Einrichtung 18 zur Überwachung der
Zeit zwischen Erzeugung des Warnsignals und Reaktion des Fahrers auf das Warnsignal.
Bei Überschreitung eines vorgebbaren Zeitlimits initiiert die Einrichtung eine Bremsung
des Fahrzeugs zur Vermeidung einer Kollision des Fahrzeugs mit dem Hindernis.
1. Verfahren zur Warnung vor Hindernissen mit nicht ausreichender Durchfahrtshöhe und/oder
nicht ausreichender Durchfahrtsbreite, insbesondere für Kraftfahrzeuge, wobei die
Durchfahrtshöhe und/oder die Durchfahrtsbreite des Hindernisses ermittelt und an einen
Fahrer Maßnahmen zu seiner Unterstützung bei oder vor Durchfahrt des Hindernisses
ausgegeben werden, wobei
- vorausliegende Überkopfhindernisse und/oder vorausliegende seitliche Hindernisse
und die jeweilige Fahrbahnoberfläche abgetastet werden zur Erfassung von durchfahrtsrelevanten
Daten der Hindernisse,
- die ermittelten durchfahrtsrelevanten Daten der Hindernisse mit durchfahrtsrelevanten
Daten des Fahrzeugs verglichen werden,
- ein Warnsignal an den Fahrer ausgegeben wird, wenn die durchfahrtsrelevanten Daten
des Fahrzeugs die durchfahrtsrelevanten Daten des Hindernisses überschreiten oder
mit diesen gleich sind und
- die Warnung durch ein optisches, akustisches oder haptisches Signal erfolgt,
dadurch gekennzeichnet, dass
ein Zeitlimit zwischen Abgabe des Warnsignals und Reaktion des Fahrers vorgesehen
ist, bei dessen Überschreitung das Fahrzeug automatisch abgebremst wird.
2. Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass vorausliegende Überkopfhindernisse und/oder vorausliegende seitliche Hindernisse
und die jeweilige Fahrbahnoberfläche gleichzeitig abgetastet werden zur Erfassung
von den Hindernissen zugeordneten Winkel- und Abstandsinformationen.
3. Verfahren nach Anspruch 2, dadurch gekennzeichnet, dass aus den Winkel- und Abstandsinformationen die Durchfahrtshöhe und/oder die Durchfahrtsbreite
der Hindernisse berechnet werden/wird.
4. Verfahren nach Anspruch 1 oder 3, dadurch gekennzeichnet, dass die durchfahrtsrelevanten.Daten des Fahrzeugs, nämlich die Höhe und/oder Breite des
Fahrzeugs vor Fahrantritt vom Fahrer in einen Speicher einer Vergleichseinrichtung
eingegeben werden oder in dem Speicher bereits abgespeichert sind.
5. Verfahren nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die berechnete Durchfahrtshöhe und/oder die berechnete Durchfahrtsbreite des Hindernisses
in der Vergleichseinrichtung mit der eingegebenen oder abgespeicherten Höhe und/oder
Breite des Fahrzeugs verglichen werden/wird, wobei ein Warnsignal an den Fahrer ausgegeben
wird, wenn die Höhe und/oder Breite des Fahrzeugs mit der Durchfahrtshöhe und/oder
der Durchfahrtsbreite des Hindernisses übereinstimmen/übereinstimmt oder diese überschreiten/überschreitet.
6. Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass als haptische Signalisierung ein kurzes Bremsrucken vorgesehen ist.
7. Anordnung (2) zur Warnung vor Hindernissen mit nicht ausreichender Durchfahrtshöhe
und/oder nicht ausreichender Durchfahrtsbreite, insbesondere für Kraftfahrzeuge, wobei
auf dem Kraftfahrzeug eine Vergleichs- und Warnsignale generierende Einrichtung (4)
und eine Sensoreinrichtung (6) installiert sind, wobei die Vergleichs- und Warnsignale
generierende Einrichtung (4) mit einem ersten Speicher (8) für durchfahrtsrelevante
Daten oder Parameter des Kraftfahrzeugs und mit einem zweiten Speicher (10) für durchfahrtsrelevante
Daten der Hindernisse verbunden ist und die Sensoreinrichtung (6) zur Abtastung und
Erfassung von durchfahrtsrelevanten Daten vorausliegender Hindernisse und zur Eingabe
dieser Daten in den zweiten Speicher vorgesehen ist und wobei in der Vergleichs- und
Warnsignale generierenden Einrichtung (4) die durchfahrtsrelevanten Daten aus dem
ersten und zweiten Speicher (8, 10) derart miteinander verglichen werden, dass ein
Warnsignal für den Fahrer generiert wird, wenn die dem Hindernis zugeordneten, durch
die Sensoreinrichtung (6) ermittelten Daten aus dem zweiten Speicher (10) mit den
dem Fahrzeug zugeordneten Daten aus dem ersten Speicher (8) übereinstimmen oder diese
unterschreiten, wobei die Warnsignale generierende Einrichtung (4) optische, akustische
und/oder haptische Warnsignale für den Fahrer generiert,
dadurch gekennzeichnet, dass
eine Einrichtung (18) zur Überwachung der Zeit zwischen Erzeugung des Warnsignals
und Reaktion des Fahrers vorgesehen ist, die bei Überschreitung eines vorgebbaren
Zeitlimits eine Bremsung des Fahrzeugs auslöst.
8. Anordnung nach Anspruch 7, dadurch gekennzeichnet, dass die Sensoreinrichtung (6) zur Erfassung der Kontur eines Vertikalschnitts des Hindernisses
wenigstens einen Abstandssensor (12) mit hoher Winkelauflösung und einer zur gleichzeitigen
Erfassung des Hindernisses und der Fahrbahnoberfläche ausgelegten Erfassungsgeometrie
aufweist.
9. Anordnung nach Anspruch 8, dadurch gekennzeichnet, dass die von der Sensoreinrichtung (6) erfassten Winkel- und Abstandsinformationen einer
Auswerteeinrichtung (14) zur Auswertung und Ermittlung der Durchfahrtshöhen und/oder
der Durchfahrtsbreiten des jeweiligen Hindernisses zugeführt werden.
10. Anordnung nach Anspruch 7, dadurch gekennzeichnet, dass ein Bedienelement (16) vorgesehen ist, mittels dessen der Fahrer vor Fahrtantritt
die durchfahrtsrelevanten Daten des Fahrzeugs in den ersten Speicher (8) eingibt.
11. Anordnung nach Anspruch 7, dadurch gekennzeichnet, dass die durchfahrtsrelevanten Daten des Fahrzeugs im System parametriert sind.
12. Anordnung nach Anspruch 7, dadurch gekennzeichnet, dass eine optische Anzeigeeinrichtung (20) zur optischen Anzeige von Warnsignalen, ein
Lautsprecher (22) zur akustischen Ausgabe von Warnsignalen und als haptisches Warnsignal
kurzes Bremsrucken einer Bremse (24) vorgesehen ist.
13. Anordnung nach Anspruch 8, dadurch gekennzeichnet, dass es sich bei dem Sensor um einen Abstandssensor eines anderen Fahrerassistenzsystems
handelt, wie beispielsweise eines Abstandsregeltempomaten.
1. Method for warning about obstacles which are not high and/or wide enough to drive
through, in particular for motor vehicles, wherein the drive-through height and/or
the drive-through width of the obstacle are determined and measures for assisting
the driver when or before he drives through the obstacle are output to said driver,
wherein
- overhead obstacles lying ahead and/or lateral obstacles lying ahead and the respective
surface of the carriageway are scanned in order to acquire data which are relevant
to driving through the obstacles,
- the determined data of the obstacles which are relevant to driving through are compared
with data of the vehicle which are relevant to driving through,
- a warning signal is output to the driver if the data of the vehicle which are relevant
to driving through exceed or are the same as the data of the obstacle which are relevant
to driving through, and
- the warning is issued by means of a visual, acoustic or haptic signal,
characterized in that
a time limit between the outputting of the warning signal and the driver's reaction
is provided, the vehicle being automatically braked when said time limit is exceeded.
2. Method according to Claim 1, characterized in that overhead obstacles lying ahead and/or lateral obstacles lying ahead and the respective
surface of the carriageway are scanned simultaneously in order to acquire angle information
and distance information assigned to the obstacles.
3. Method according to Claim 2, characterized in that the drive-through height and/or the drive-through width of the obstacles are/is calculated
from the angle information and distance information.
4. Method according to Claim 1 or 3, characterized in that the data of the vehicle which are relevant to driving through, specifically the height
and/or width of the vehicle, are input into a memory of a comparator device by the
driver, or are already stored in the memory, before the journey starts.
5. Method according to one of the preceding claims, characterized in that the calculated drive-through height and/or the calculated drive-through width of
the obstacle are/is compared in the comparator device with the input or stored height
and/or width of the vehicle, wherein a warning signal is output to the driver if the
height and/or width of the vehicle correspond/corresponds to the drive-through height
and/or the drive-through width of the obstacle or exceed/exceeds said drive-through
height and/or drive-through width of the obstacle.
6. Method according to Claim 1, characterized in that a short braking jolt is provided as haptic signalling.
7. Apparatus (2) for warning about obstacles which are not high and/or wide enough to
drive through, in particular for motor vehicles, wherein a device (4) which generates
comparison signals and warning signals and a sensor device (6) are installed on the
motor vehicle, wherein the device (4) which generates comparison signals and warning
signals is connected to a first memory (8) for data or parameters of the motor vehicle
which are relevant to driving through and is connected to a second memory (10) for
data of the obstacles which are relevant to driving through, and the sensor device
(6) is provided for scanning and acquiring data of obstacles lying ahead which are
relevant to driving through and for inputting these data into the second memory, and
wherein, in the device (4) which generates comparison signals and warning signals,
the data from the first and second memories (8, 10) which are relevant to driving
through are compared with one another, in that a warning signal is generated for the
driver if the data from the second memory (10) which are acquired by the sensor device
(6) and are assigned to the obstacle correspond to or fall below the data from the
first memory (8) which are assigned to the vehicle, wherein the device (4) which generates
warning signals generates visual, acoustic and/or haptic warning signals for the driver,
characterized in that
a device (18) for monitoring the time between the generation of the warning signal
and the driver's reaction is provided, which device (18) triggers braking of the vehicle
when a predefinable time limit is exceeded.
8. Apparatus according to Claim 7, characterized in that the sensor device (6) has, for sensing the contour of a vertical section of the obstacle,
at least one distance sensor (12) with high angular resolution and a sensing geometry
which is configured to sense the obstacle and the surface of the carriageway simultaneously.
9. Apparatus according to Claim 8, characterized in that the angle and distance information which are acquired by the sensor device (6) are
fed to an evaluation device (14) for evaluating and determining the drive-through
heights and/or the drive-through widths of the respective obstacle.
10. Apparatus according to Claim 7, characterized in that an operator control element (16) is provided by means of which the driver inputs
the data of the vehicle which are relevant to driving through into the first memory
(8) before the journey starts.
11. Apparatus according to Claim 7, characterized in that the data of the vehicle which are relevant to driving through are parameterized in
the system.
12. Apparatus according to Claim 7, characterized in that a visual display device (20) is provided for visually displaying warning signals,
a loudspeaker (22) is provided for acoustically outputting warning signals, and brief
braking jolt of a brake (24) is provided as a haptic warning signal.
13. Apparatus according to Claim 8, characterized in that the sensor is a distance sensor of another vehicle assistance system such as, for
example, an adaptive cruise controller.
1. Procédé pour alerter de la présence d'obstacles ayant une hauteur de passage insuffisante
et/ou une largeur de passage insuffisante, notamment pour des véhicules automobiles,
la hauteur de passage et/ou la largeur de passage de l'obstacle étant déterminée et
des dispositions étant communiquées à un conducteur pour l'assister pendant ou avant
le passage de l'obstacle, selon lequel
- les obstacles en hauteur qui se trouvent à l'avant et/ou les obstacles latéraux
qui se trouvent à l'avant ainsi que la surface respective de la chaussée sont explorés
pour détecter les données de l'obstacle qui concerne le passage,
- les données déterminées de l'obstacle qui concernent le passage sont comparées avec
les données du véhicule qui concernent le passage,
- un signal d'alerte est communiqué au conducteur si les données du véhicule qui concernent
le passage sont supérieures ou égales au données de l'obstacle qui concernent le passage
et
- l'alerte est donnée sous la forme d'un signal visuel, sonore ou sensoriel,
caractérisé en ce qu'il est prévu une limite de temps entre l'émission du signal et la réaction du conducteur,
le véhicule étant automatiquement freiné si celle-ci est dépassée.
2. Procédé selon la revendication 1, caractérisé en ce que les obstacles en hauteur qui se trouvent à l'avant et/ou les obstacles latéraux qui
se trouvent à l'avant ainsi que la surface respective de la chaussée sont explorés
simultanément pour détecter les informations d'angle et de distance associées aux
obstacles.
3. Procédé selon la revendication 2, caractérisé en ce que la hauteur de passage et/ou la largeur de passage des obstacles est/sont calculée(s)
à partir des informations d'angle et de distance.
4. Procédé selon la revendication 1 ou 3, caractérisé en ce que les données du véhicule qui concernent le passage, à savoir la hauteur et/ou la largeur
du véhicule, sont saisies par le conducteur dans une mémoire d'un dispositif de comparaison
avant de commencer le déplacement ou sont déjà enregistrées dans la mémoire.
5. Procédé selon l'une des revendications précédentes, caractérisé en ce que la hauteur de passage calculée et/ou la largeur de passage calculée de l'obstacle
est/sont comparée(s) dans le dispositif de comparaison avec la hauteur et/ou la largeur
enregistrée(s) du véhicule, un signal d'alerte étant communiqué au conducteur lorsque
la hauteur et/ou la largeur du véhicule coïncide(nt) avec la hauteur de passage et/ou
la largeur de passage ou dépassen(t) celle(s)-ci.
6. Procédé selon la revendication 1, caractérisé en ce que la signalisation sensorielle prévue est un bref coup de frein.
7. Arrangement (2) pour alerter de la présence d'obstacles ayant une hauteur de passage
insuffisante et/ou une largeur de passage insuffisante, notamment pour des véhicules
automobiles, un dispositif (4) qui génère des signaux de comparaison et d'alerte ainsi
qu'un dispositif de détection (6) étant installés sur le véhicule, le dispositif (4)
qui génère des signaux de comparaison et d'alerte étant relié avec une première mémoire
(8) pour les données ou les paramètres du véhicule qui concernent le passage et avec
une deuxième mémoire (10) pour les données des obstacles qui concernent le passage
et le dispositif de détection (6) étant prévu pour explorer et détecter les données
qui concernent le passage des obstacles qui se trouvent à l'avant et pour entrer ces
données dans la deuxième mémoire et les données issues de la première et de la deuxième
mémoires (8, 10) étant comparées entre elles dans le dispositif (4) qui génère des
signaux de comparaison et d'alerte de telle sorte qu'un signal d'alerte destiné au
conducteur est généré si les données associées à l'obstacle et déterminées par le
dispositif de détection (6), issues de la deuxième mémoire (10), sont égales ou inférieures
aux données associées au véhicules et issues de la première mémoire (8), le dispositif
(4) qui génère des signaux d'alerte générant des signaux visuels, sonores et/ou sensoriels
pour le conducteur,
caractérisé en ce qu'il est prévu un dispositif (18) de surveillance de la durée entre la génération du
signal d'alerte et la réaction du conducteur, lequel déclenche un freinage du véhicule
en cas de dépassement d'une limite de temps à prédéfinir.
8. Arrangement selon la revendication 7, caractérisé en ce que le dispositif de détection (6) présente, pour détecter le contour d'une section verticale
de l'obstacle, au moins un détecteur de distance (12) à haute résolution angulaire
et une géométrie de détection conçue pour la détection simultanée de l'obstacle et
de la surface de la chaussée.
9. Arrangement selon la revendication 8, caractérisé en ce que les informations d'angle et de distance détectées par le dispositif de détection
(6) sont acheminées à un dispositif d'interprétation (14) pour interpréter et déterminer
les hauteurs de passage et/ou les largeurs de passage de l'obstacle correspondant.
10. Arrangement selon la revendication 7, caractérisé en ce qu'il est prévu un élément de commande (16) au moyen duquel le conducteur saisit dans
la première mémoire (8) les données du véhicule qui concernent le passage avant de
commencer le déplacement.
11. Arrangement selon la revendication 7, caractérisé en ce que les données du véhicule qui concernent le passage sont paramétrées dans le système.
12. Arrangement selon la revendication 7, caractérisé en ce qu'un dispositif indicateur visuel (20) est prévu pour l'indication visuelle des signaux
d'alerte, un haut-parleur (22) pour la diffusion sonore des signaux d'alerte et un
bref coup de frein d'un frein (24) comme signal d'alerte sensoriel.
13. Arrangement selon la revendication 8, caractérisé en ce que le capteur est un détecteur de distance d'un autre système d'assistance au conducteur,
comme par exemple un régulateur actif vitesse-distance.
IN DER BESCHREIBUNG AUFGEFÜHRTE DOKUMENTE
Diese Liste der vom Anmelder aufgeführten Dokumente wurde ausschließlich zur Information
des Lesers aufgenommen und ist nicht Bestandteil des europäischen Patentdokumentes.
Sie wurde mit größter Sorgfalt zusammengestellt; das EPA übernimmt jedoch keinerlei
Haftung für etwaige Fehler oder Auslassungen.
In der Beschreibung aufgeführte Patentdokumente